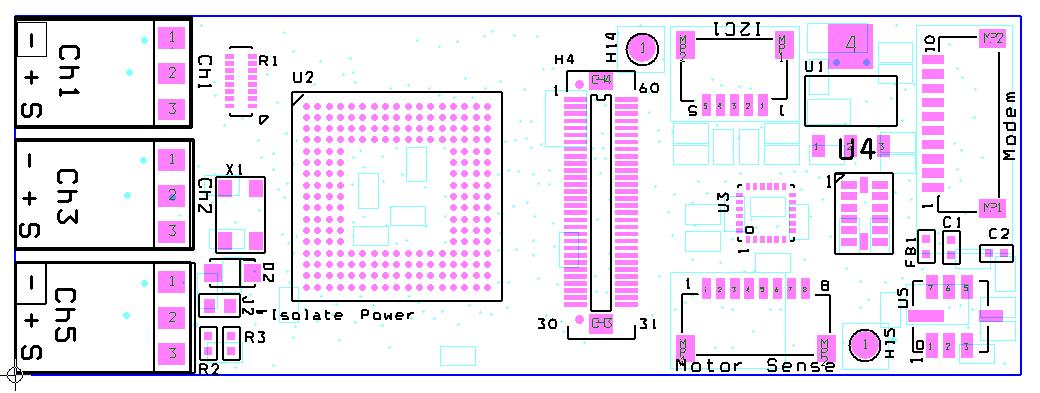
The Ruby system is a simple hub (the "controller"), with spokes ("peripherals", power input, and servos).
Here's a list of all connections to / from the Ruby controller.
| Label |
logical connection name |
interface |
physical connector |
|
| Airspeed / Magnetometer |
i2c1 |
i2c (open drain) |
5 position JST SH/SR |
can daisy chain many i2c devices on this bus |
| i2c1 |
i2c1 |
i2c (open drain) |
5 position JST SH/SR |
"i2c" is now used for power sensor.
This connection is interchangeable with "airspeed/magnetometer" |
| GPS |
ser0 |
UART 3.3v, 56400 baud NMEA (configurable) |
4 position JST SH/SR |
Can connect any GPS module with 3.3v serial UART connection. |
| Modem |
ser1 |
UART 3.3v, 115200 baud |
10 position JST SH/SR |
usually connected to transceiver
includes CTS/RTS and extra wires to carry power |
| Motor Sense |
ADCs |
ADC (measure voltage 0-3.3 v) |
8 position JST SH/SR |
Now only used with thermal probes (3). No longer used to detect motor power or voltage - using i2c1 instead. |
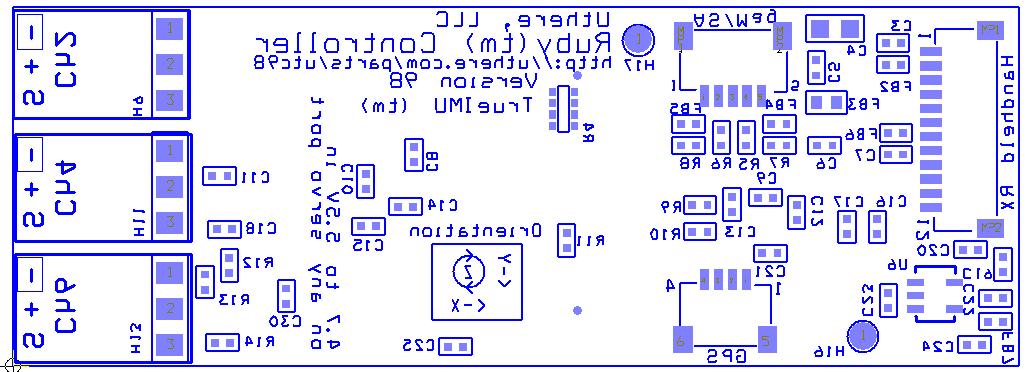
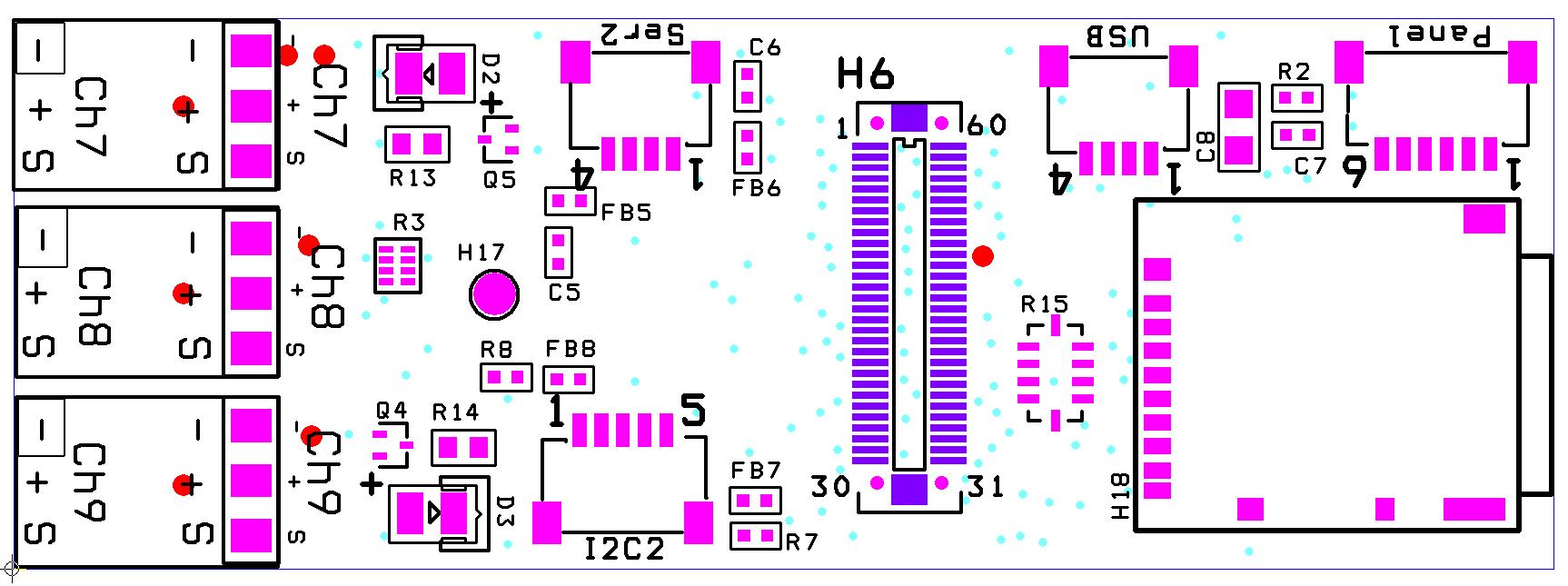
| Ch1..Ch9 |
PWM0..8 |
PWM outputs to servos, ESC, etc.. |
"Standard servo plug" (100 mil Molex) |
System power input can be on any of pins 1-6 |
| Handheld RX |
|
PWM / PPM inputs from handheld receiver |
12 position JST SH/SR |
Currently only supporting PPM input (i.e. from UHF handheld receiver). Pins 5-12 no longer used.
Provides 4.7 volt low power to receiver (input 5.0v minus stepdown diode). |
Ser2
(on Expander) |
ser2 |
UART 3.3v 9600 - 115200 baud |
4 position JST SR |
Available for auxillary device. |
| (60 pin header) |
(many) |
(many) |
60 position Hirose DF12-60 |
Many signals brought out on this header to allow modules to be stacked.
See pinouts: ruby_expander_60pin_header.pdf |
See also:
Pinout schematics:
ruby_controller_headers_1.pdf
ruby_controller_servo_out_and_ppm_in_headers.pdf
ruby_expander_headers.pdf
ruby_expander_60pin_header.pdf
Connector layout:
ruby_controller_connector_layout_top.jpg
ruby_controller_connector_layout_bottom.jpg
ruby_expander_connector_layout.jpg
Photos of physical boards
photos_of_ruby_controller_and_expander.zip
Power requirements:
4.7 to 6.0 volts
approx 120 ma typ.
(Feed into center pin of any of servo ports 1-6)
Notes:
JST SR cabling
typically 30 gauge ribbon cable with IDT connector. uThere has necessary factory tool to correctly produce custom ribbon cables terminated with SR connectors.
uThere also can provide SR connectors with discrete 28 gauge wires terminated with crimped connectors, suitable for splicing to other cables / systems. We do not have very good tooling for crimping of these connectors, but have inventory of wires of various lengths with crimp terminals applied by outsourced factory.
We find the ribbon cables preferable whenever possible due to lower bulk.
Custom modification of board design by uThere is possible
Change PCB layout, different connector type, etc...
|
{kind=link}
{kind=link}
{kind=link}