| When you shut off the transmitter while in manual mode, Ruby should enter autonomous mode. You should see the controls come to life to level the plane as you tilt it, and the red light should start blinking if it wasn't before. If this does not happen, you have a potentially dangerous configuration that could result in Ruby flying off into the distance. Read below to resolve this:
It's likely that your receiver has a "failsafe" feature that is causing Ruby to think that you're still in control when signal has been lost.
Usually the only way to enable Ruby to tell if signal is lost is to make your receiver output an extraordinarily low value on the throttle channel when it's in its "failsafe" mode. When Ruby sees the throttle go down to this value, it will know that signal has been lost and that it must assume control and bring your plane back home.
To set your receiver failsafe correctly:
On your transmitter:
Move throttle stick to the "off" position.
Move mode switch to the position for "autonomous" mode. |
|
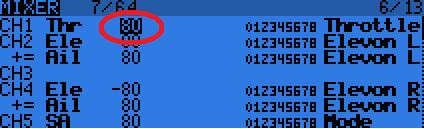
Taranis / Turnigy transmitters: Set throttle channel to 80% servo rates.
[more info about Taranis / Turnigy]
|
 |
| Other transmitters: Set throttle channel to default "100%" servo rates. |
|
| Push trim on the throttle channel down as far as possible. |
 |
| |
 |
| |
|
Follow manufacturer's instructions for setting failsafe on the receiver so that the current transmitter control positions will be output when signal is lost.
For some systems, you simply press a button. On others, failsafe is only set at the time the receiver is a bound to the transmitter.
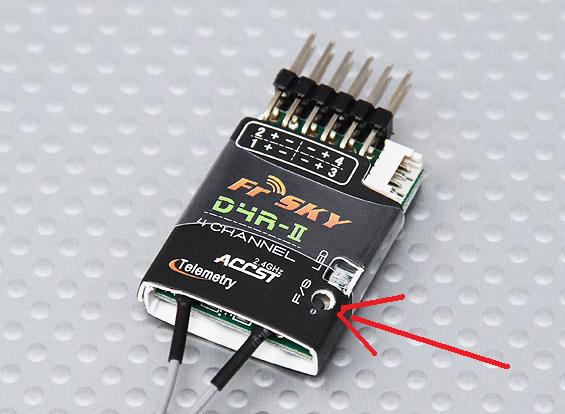
For the FrSKY "D4R-II" receiver: Apply power to transmitter and receiver, set transmitter controls as indicated above, then simply press the recessed "F/S" button momentarily. There will be no acknowledgement or change in the blinking of lights. |
 |
Restore throttle trim to normal / centered position and normal 100% servo rates.
If you don't do this, Ruby will see the "extraordinarily low" value on the throttle channel, think that signal has been lost, and will not give you control unless you happen to apply throttle. |
|
Testing failsafe:
Meet all conditions necessary to get Ruby to an "OK to Fly" status : Use battery that isn't discharged, turn on transmitter, take the plane outdoors where it can get a GPS fix and be away from sources of magnetic field distortion if necessary, make it stationary, perform a preflight. Do whatever you need to get Ruby to give you elevator wags rather than aileron wags. [more info... ]
Just the green light should be flashing, indicating "all OK". Turn off your transmitter. You should now see the red light flashing as well. If just the green light continues to blink, then Ruby was not able to detect that signal was lost.
If the status lights on the Ruby Controller are hard to see, remember the "control panel" which also has the red and green status lights. You can plug it into the "panel" port on Ruby Expander and locate in a more visible spot on the plane permanently or temporarily.
This is the most critical part of configuration. If you have any doubts, send to support@uthere.com the data.utd file created when you turn everything on, then turn transmitter off.
If you're having difficulties getting failsafe to work:
| Most transmitters have a bar graph screen that can be selected to display showing positions of each channel. You can use this display to verify that you are indeed pushing the throttle channel down below its normal low value for binding, and that you've restored it to normal after binding. |
Throttle channel with throttle stick on "off" position and trim pushed down to give an "extrordinarily low" value:

|
Throttle channel with throttle stick on "off" position and trim removed for normal operation:

|
If you're still having trouble getting failsafe to work correctly , "don't spin your wheels". Send to support@uthere.com a "data.utd" file that was recorded by Ruby while you turned transmitter off and then on again.
If you have a 3rd party add-on transmitter module that is powered independently of your transmitter:
Always remember to turn off power to the transmitter module whenever your handheld transmitter is turned off or loses power.
Reason: Some add-on transmitter modules are powered independently of the handheld transmitter and continue to transmit even when the transmitter is turned off. When they no longer see a signal from the handheld transmitter, they broadcast their own failsafe values which are different from the ones you set up in the receiver. Typically, all channels including throttle are moved to center and these can't be changed. This is a bad situation since there is no way for Ruby to tell that it should go into failsafe mode when this happens. Ruby will fly the plane forever in a straight line at half throttle!
For technical users:
On most transmitters, the normal throttle off position is 1100 microseconds, but it can be dipped down to about 950 microseconds using the trim or other adjustment on the transmitter. By default, Ruby is configured to assume that signal is lost if the throttle drops below 1050 usecs. (1150 usecs if you're using "Fixed Endpoints")
On Turnigy and Taranis transmitters, all channels including throttle will by default range from about 1000 to 2000 usecs instead of 1100 to 1900. When throttle stick is in the off position, the control is at 1000 usecs, which is below the 1050 threshold for failsafe. We recommend setting all "weights" / "rates" to 80 instead of default 100. This will give a normal 1100 - 1900 usec range suitable for Ruby and will also give best performance on most servo driven controls, since the extremes of the servo arm sweep are avoided.
|