Your ESC, your transmitter, and Ruby all need to have the same minimum and maximum values on the throttle channel correspond to 0% and 100% motor power.
"Endpoints" refer to the extreme values that your transmitter outputs on a channel. For instance, on most transmitters, the throttle channel will range from one endpoint of 1100 usecs with the throttle stick on the "off" position to the other endpoint of 1800 usecs with throttle stick on the "on" position.
We recommend that you follow your ESC manufacturer's instructions for setting "fixed endpoints" if that is an option, rather than have it try to detect endpoints. In this mode, your ESC will always assume that endpoints will be at specific values (for Castle, these endpoints are usually 1200 usecs and 1700 usecs). Most brands of ESCs including Castle offer this option. This will avoid common problems and confusion associated with the ESC trying to determine endpoints on its own. [setting fixed endpoints...]
If "fixed endpoints" are not an option on your ESC, you should follow your ESC manufacturer's instructions for "setting endpoints". This usually involves powering everything up with throttle stick on the 100% position to put it into endpoint set mode (remove prop first to be safe!), and then moving throttle stick to 0% You'll hear beeps from the ESC to confirm.
If you can't get your ESC into programming mode
It sometimes helps to disconect your ESC from Ruby, move throttle stick all the way forward, then connect it again so it sees a control signal with throttle "high" the moment it is powered up. (The ESC shouldn't start the motor if the throttle stick hasn't first moved to the "off" position, but to be safe, be sure to remove propeller first!)
Alternately, you can simply disconnect your receiver from Ruby, connect power and your ESC directly to it, and proceed with manufacturer's instructions.
What happens when ESC endpoints are not set correctly:
If you have not "set endpoints" or selected "fixed endpoints", your ESC won't know what range to expect on the transmitter channel. You and Ruby won't have good control of the throttle.
Most commonly, the first time after powering your ESC that you push the throttle stick forward, you'll hit maximum power before throttle stick reaches 100%. After you've ramped the throttle all the way to 100%, it will behave correctly.
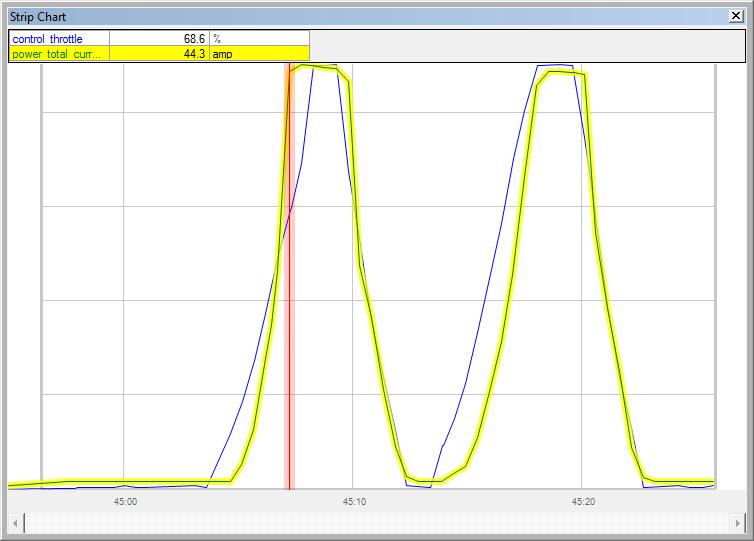
It's possible for Ruby to never reach 100% throttle, and to be confused by the power hitting maximum at some lower throttle value. This will cause throttle oscillations and poor airspeed and altitude control in aided and autonomous modes.