ESC fixed endpoints setup (Example using Castle ESC + Turnigy/Taranis/OpenTx receiver)
We recommend configuring your ESC and Ruby to use "Fixed Endpoints" rather than having the ESC attempt to detect endpoints on your transmitter.
Instructions:
(Based on Castle Creations official instructions for setting fixed endpoints.)
Remove prop
|
|
| Use CastleLink to configure your ESC:
Set it to "Fixed Endpoints", "Hard" throttle, and "Soft" brakes |
|
| Turn on tx (don't power up Ruby yet) |
|
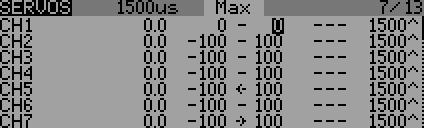
Go to the "SERVOS" screen in tx setup, where you set endpoints.
Move cursor to CH1 (throttle)
Set high and low endpoints to 0.
This will squeeze the throttle control to center (1500 usecs)
|
 |
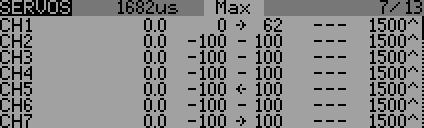
| Move throttle stick to full 100% position |
|
Apply power to Ruby
You should hear ESC beep but not give the tone that it normally does when it arms. |
|
Increase the high throttle endpoint in your transmitter until you hear the controller beep. Then go up 2 more percent.
If there's an indicator light, it will flash slow steady red. |
 |
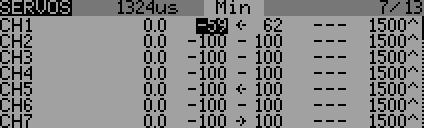
| Move throttle stick to low position
Decrease the low throttle endpoint in your transmitter until you hear the controller initialize, then go down 2 more percent.
If there's an indicator light, it will flash slow steady amber. |
 |
At this point the tx and ESC should be matched.
|
|
Attach propeller.
Move your throttle slowly from 0 to 100% and back to 0.
There should be little "dead zone" at low or high throttle where moving stick has no effect on motor.
Send recorded data file to support@uthere.com to be sure that your Ruby configuration matches these endpoints. |
|
|
|
|