Controller
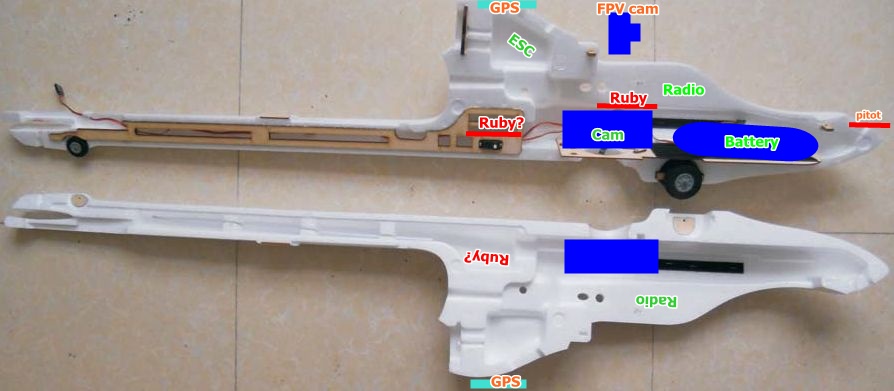
You can put the Ruby controller just about anywhere inside the plane. It can be flat or on its side and even placed lenghtwise. We prefer to simply put it in the payload area behind the battery. Just be sure that the controller's axes are level with the plane's axes.
Airspeed / Magnetometer
While it's possible to put the airspeed/magnetometer along with the controller inside the payload area and embed the pitot tubing in the nose, we find it best to embed this sensor in the bottom of the wing, about halfway out to the tip, at least a few inches away from the aileron servo. This avoids the battery from ramming against the sensor, avoids electromagnetic fields from the power lines, and possible ferrous or magnetic parts in the payload. It's also easier to align the magnetometer with the plane's flying axis when it's on the bottom of the wing.
Ruby ships with a cable extension that makes it easier to connect and disconnect the airspeed / magnetometer when attaching and removing the wing.
Receiver
When using satellite receivers, we like to embed them in the tail boom or vertical stabilizer, preferably prior to gluing the two fuselage halves together. This gives best reception, gets the receiver away from video transmitter, and reduces clutter. If you use two satellites, be sure to orient the antennae at 90 degrees to each other for best coverage.
Servo connections
Simply connect servos to Ruby as they are labeled on Ruby. Right aileron goes to "2 Ail R", etc... Note that the servo numbering on Ruby doesn't correspond to your transmitter / receiver channel numbers. |