"Straight in" landing
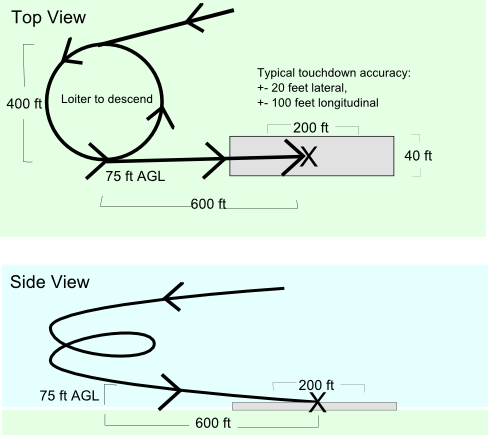
In "autonomous landing" mode, Ruby will fly out and descend or climb to a "final approach entry point" and then descend in a final approach from there towards the landing target, applying throttle and crabbing into the wind as necessary to stay on a straight glidepath.
By default, the final approach entry point is located 600 feet away from the location where a "set home" was performed and 75 feet AHGL. It will be located opposite the direction the plane was sitting when "set home" was performed (should be downwind).
If the plane's altitude is not close to 75 feet AHGL when it reaches the final approach entry location, Ruby will loiter around that location in a circle or pacing pattern and descend (or climb) until it reaches 75 feet AHGL.
See the [example autonomous "straight in" landing video].
The remaining information below is only necessary if landing in area that is not free of obstructions or prohibited areas within a 1000 foot radius of the landing target.
Selecting a site for "straight in" landings
Ritewing Robotics planes don't currently have a way to steepen glideslope [this is pending development]. So, if a "straight in" landing is used, the landing site must accommodate a fairly shallow glideslope.
At 600 feet away from landing target, Ruby will be at about 75 feet altitude. At 200 feet away it will be at about 25 feet altitude.
Accounting for possible deviations of altitude or altimeter accuracy, there should be at least 40 feet of margin between obstruction height and anticipated glidepath. So, at 600 feet range, there should be no obstruction higher than than 35 feet. At closer than 300 foot range, there should no obstructions at all.
So, using default configuration, straight-in landings require a sloping corridor free of obstructions that is 200 foot wide and extends 600 feet downwind from desired touchdown location and has a 6 degree slope. By default, this final approach ramp starts at 600 ft range and 35 ft altitude, but this can be configured to different values, as long the glideslope is not made any steeper than about 6 degrees or 10 ft drop per 100 feet lateral for a low drag plane without flaps or spoilers.
As it circles or paces to descend to the final approach entry point, the plane may fly a circuit as low as 75 feet AHGL. So, in addition to the final approach ramp, a large 600 x 600 foot area located from about 300 to 900 feet range downwind needs to be clear of obstacles higher than 35 feet AHGL.
Alternate landing patterns for difficult sites
If obstructions are higher in this area but a final approach corridor exists, the landing configuration can be adjusted so that the final approach entry point is higher but also farther from touchdown point. See [long high straight-in landing].
Alternately, for fields that are hemmed in by high obstructions without a suitable final approach corridor: If there's at least a 350 feet radius between home and the nearest obstruction, a "loiter landing" can be used in which the plane simply continues to fly a circling or pacing loiter pattern as it descends.
To circle in a specified direction / on a specified side of the landing area:
Circling and landing direction are determined by the orientation of the plane when you "set home". By default, Ruby will loiter and land in a counterclockwise "left hand pattern", staying on the left side of the landing vector.
It's sometimes necessary to have Ruby stay on a particular side of the landing vector to avoid obstacles or prohibited zones.
While you flip the switch to "set home", have the plane pointing to the side of the final approach on in which you'd like it to loiter while descending. For instance, have it pointing away from the pit area. As soon as Ruby wags controls to indicate that it is beginning preflight, immediately rotate the plane to point in the desired landing direction. Ruby will land in whatever direction the plane is pointing at the time it completes the preflight. Note that landing pattern direction can be set in this way only when you "set home", not when you simply "preflight".
Adjusting landing parameters to suit a particular airframe
The long final approach is intended to accommodate the shallow glideslopes of gliders and flying wings with no headwind. Shorter final approaches are possible with other types of planes having steeper glidepaths due to higher drag or the availability of spoilers or flaps. [c
There are currently no tools available to allow you to adjust landing parameters. Contact [support@uthere.com] to have these adjustments made.
Tips:
Use satellite and street view Google Earth or Bing to scout possible new landing sites. Use the "ruler" tool to measure distances.
Note that altitudes mentioned above are "Above Home Ground Level" ("AHGL"), which maybe different from "Above Home Level" if the terrain around home is not flat. Keep this in mind when considering the heights of trees and ther obstructions which might be on hills surrounding the landing area.
More info:
How to enter autonomous landing mode
How to set the landing location and direction ("set home")
"Long, High, straight-in" landing
"Loiter landing"
|