You can simulate a mission in Ground Control, with Ruby hardware "in the loop", connected via the USB port.
This can be helpful for practice and teaching demonstration.
Overview
In simulation mode, the Ground Control software will act as a flight simulator. For operation, it currently requires that the Ruby autopilot be connected. ("Hardware in the loop"). Instead of obtaining position, orientation, and sensor information from actual sensors, Ruby will receive simulated values from Ground Control software via USB port. Ruby will send its normal telemetry stream back to Ground Control through the USB connection.
Servos, motor, handheld receiver will remain active.
Because the motor will be active, *** disconnect motor or remove propeller or before simulation!
Install the driver
It's necessary to install a driver to enable Windows to connect to Ruby via the USB port.
Be sure that USB is disconnected from Ruby
** Remove propeller
Apply power to Ruby
Plug in USB [after powering up Ruby]
In Windows, open up control panel: Device Manager
If the driver for Ruby USB has not yet been loaded, it will appear as "USBSerial" under "Other Devices":
Right-click on USBSerial, select "update usb driver..."
"Browse my computer for driver..." (not "Search the internet")
Navigate to:
C:\Program Files\uThere\uThere Ground Control\usbser_driver_installer
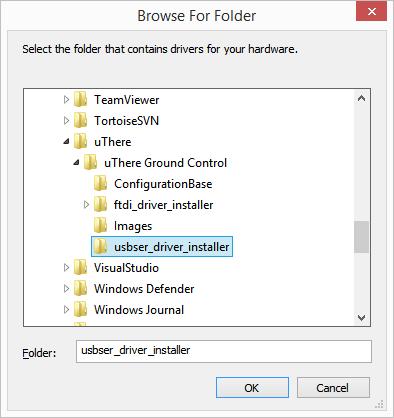
Press "OK"
You will see a warning about the driver not being verified. Press "install this driver anyway"
You should then see: "Windows has sucessfully updated your driver software": uTHERE Ruby direct connect
In the Device Manager, you should now see:
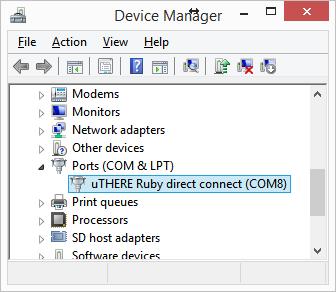
|